US2S1L12——模型空间变换
模型空间变换
模型空间的意义
模型空间(model space)也被称为对象空间(object space)或局部空间(local space)
它一般指3D模型的局部坐标系,每个模型都有自己独立的坐标空间,
模型空间的主要意义是方便我们建模,模型的顶点等数据都是基于模型空间表达的。
注意:在Unity中当模型移动或旋转时,模型空间坐标系也会随着变换,因为此时的模型坐标空间是世界坐标空间的子空间
模型空间中的注意事项
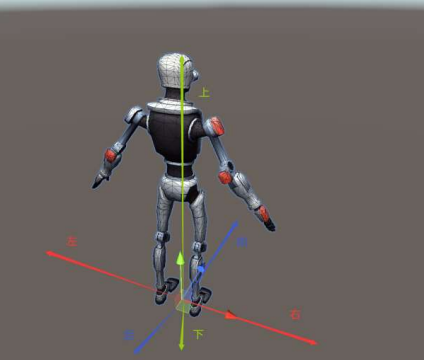
在模型空间中,我们一般会有 上、下、左、右、前、后 六种方向概念
Unity使用的是左手坐标系,因此模型空间的 x、y、z 轴,对应的是模型的右、上、前三个方向。
需要注意的是在不同的软件中,比如 3DMax 和 Maya 中模型空间中的 x、y、z 不见得是上面这种关系,
因此在开发时,需要让美术同学导出模型时,修改相关设置,让模型导出后能够满足Unity中的规范
详见:U3L17——模型导入相关设置
模型空间变换指什么
本课程中的模型空间变换指的主要是:
将模型空间中的点或向量通过矩阵乘法计算,变换为相对于世界坐标空间下数据
渲染管线是将数据分阶段的变为屏幕图像的过程
其中在几何阶段以及光栅化阶段中,我们需要将顶点等数据进行相关的变换,让其最终的数据能够显示在屏幕上。
而模型空间变换就是其中一个重要的变换步骤,就是将模型空间下的点和向量数据转换到世界空间下进行表示
如何进行模型空间变换
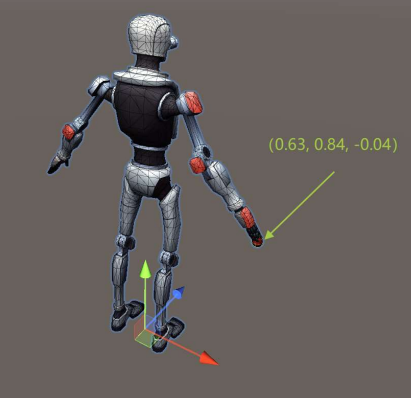
我们可以假设该机器人模型的手掌红点位置处于模型坐标空间下的(0.63, 0.84, -0.04)点
当模型在Unity中没有任何父对象,那么该模型空间的坐标系就是相对世界坐标空间的
当模型位于世界坐标原点时,当前的红点位置相对世界空间也会是(0.63, 0.84, -0.04)
但是当模型进行缩放、旋转、平移时,该点相对世界空间就会变化。
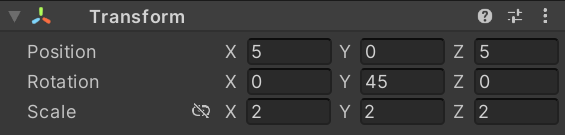
如果我们将模型进行2倍缩放,又进行(0, 45, 0)的旋转,然后再进行(5, 0, 5)的平移,
红点的相对世界空间坐标是多少呢?
根据我们之前学习的复合运算相关的知识
在进行复合运算时,一定遵守先缩放、后旋转、再平移的规则。
我们可以得到等式如下:
P相对于世界坐标系的位置=M平移M旋转M缩放P红点的列矩阵
因此可以计算(0.63, 0.84, -0.04)相对于世界空间的坐标:
P相对于世界坐标系的位置=M平移M旋转M缩放P红点的列矩阵=1000010000105051cos45∘0−sin45∘00100sin45∘0cos45∘0000120000200002000010.630.84−0.041=5.8341.684.0521
根据刚才的例子讲解,我们知道了模型空间变换的变化规则就是:
P模型空间下的点或向量相对于世界空间下的数据表达=M平移M旋转M缩放P模型空间下的点或向量
其中平移、旋转、缩放矩阵中的具体变换值都是相对于世界空间下的数据
原理:认为一开始模型坐标空间和世界坐标空间重合,模型发生缩放、旋转、平移变换时,模型空间下的点和向量也应该发生相同的变换
问题:
使用坐标变换规则进行模型空间变换
如果要使用坐标变换规则的矩阵进行模型空间变换,对于存在缩放的模型空间
只需要用 x,y,z 轴向的单位向量 × 对应轴的缩放因子 即可,相当于:
Ms−f=kx0000ky0000kz00001∣Xs∣0∣Ys∣0∣Zs∣0∣Os∣1
因此,根据上例计算:
P相对于世界坐标系的位置=Ms−fP红点的列矩阵=20000200002000010.710−0.71001000.7100.71000010.630.84−0.041=1.4140−1.414002001.41401.414000010.630.84−0.041=5.8341.684.0521
假设Unity中有一个模型空间(父空间为世界坐标空间)中的顶点P,坐标为(2,4,0)
现在将该模型平移(2,3,4)个单位,又绕Y轴旋转150度,再缩放3倍
现在请将P点进行模型空间转换得到它相对于世界坐标空间的位置:
P相对于世界坐标系的位置=M平移M旋转M缩放P红点的列矩阵=1000010000102341cos150∘0−sin150∘00100sin150∘0cos150∘0000130000300003000012401=−3.1961511
